Matlab demo - filter
In class Matlab demo EE 3054 September 22, 2014
Contents
help filter
FILTER One-dimensional digital filter.
Y = FILTER(B,A,X) filters the data in vector X with the
filter described by vectors A and B to create the filtered
data Y. The filter is a "Direct Form II Transposed"
implementation of the standard difference equation:
a(1)*y(n) = b(1)*x(n) + b(2)*x(n-1) + ... + b(nb+1)*x(n-nb)
- a(2)*y(n-1) - ... - a(na+1)*y(n-na)
If a(1) is not equal to 1, FILTER normalizes the filter
coefficients by a(1).
FILTER always operates along the first non-singleton dimension,
namely dimension 1 for column vectors and non-trivial matrices,
and dimension 2 for row vectors.
[Y,Zf] = FILTER(B,A,X,Zi) gives access to initial and final
conditions, Zi and Zf, of the delays. Zi is a vector of length
MAX(LENGTH(A),LENGTH(B))-1, or an array with the leading dimension
of size MAX(LENGTH(A),LENGTH(B))-1 and with remaining dimensions
matching those of X.
FILTER(B,A,X,[],DIM) or FILTER(B,A,X,Zi,DIM) operates along the
dimension DIM.
See also FILTER2, FILTFILT, FILTIC.
Note: FILTFILT and FILTIC are in the Signal Processing Toolbox.
Overloaded methods:
SigLogSelector.filter
gf/filter
channel.filter
gpuArray/filter
gjr/filter
garch/filter
egarch/filter
arima/filter
LagOp/filter
mfilt.filter
adaptfilt.filter
fints/filter
fxptui.filter
dfilt.filter
timeseries/filter
Reference page in Help browser
doc filter
Difference equation
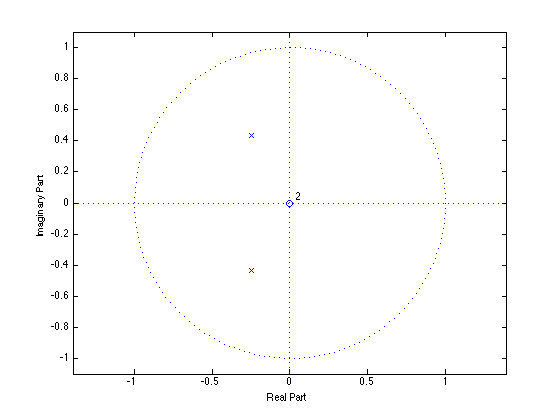
y(n) = x(n) - (1/2) y(n-1) - (1/4) y(n-2)
b = 1; a = [1 1/2 1/4] roots(a) % We found the poles were 0.5 * exp(+/- 2*pi/3 * i) 0.5 * exp(2*pi/3 * i) % agrees with 'roots'
a =
1.0000 0.5000 0.2500
ans =
-0.2500 + 0.4330i
-0.2500 - 0.4330i
ans =
-0.2500 + 0.4330i
Pole/zero diagram
zplane(b, a)
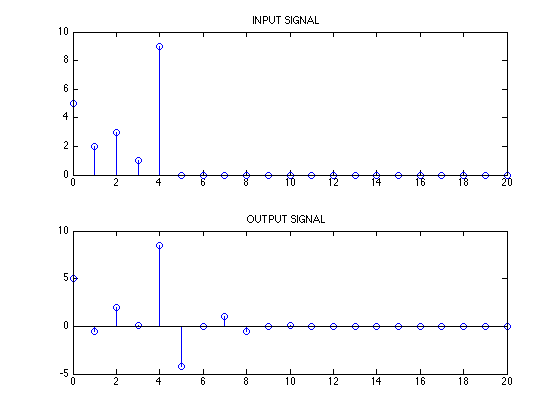
Run difference equation
% Make input signal x = zeros(1, 21); x(1:5) = [5 2 3 1 9]; n = 0:20; % plot input signal x subplot(2, 1, 1) stem(n, x) title('INPUT SIGNAL') % compute output signal y y = filter(b, a, x); % plot output signal y subplot(2, 1, 2) stem(n, y) title('OUTPUT SIGNAL')
Find impulse response
imp = [1 zeros(1, 20)]; h = filter(b, a, imp); figure(2) subplot(2, 1, 1) stem(n, imp) title('IMPULSE') subplot(2, 1, 2) stem(n, h) title('IMPULSE RESPONSE') % adjust plot axes for k = 1:2 subplot(2, 1, k) xlim([-2 20]) ylim([-1 2]) end
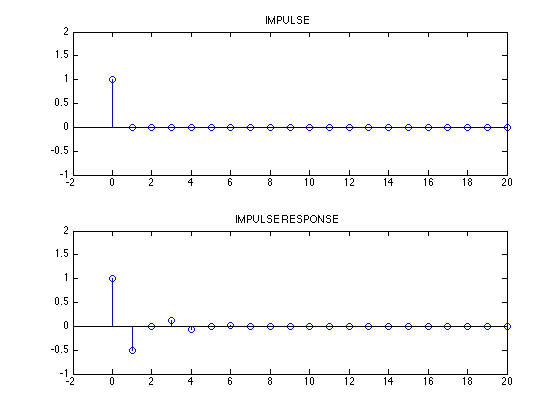
Verify formula
% Our formula for the impulse response: h2 = 2/sqrt(3) * (1/2).^n .* cos(2*pi/3 * n + pi/6); [h' h2' (h-h2)'] % impulse response formula is same as impulse response numerically computed using 'filter' function
ans =
1.0000 1.0000 -0.0000
-0.5000 -0.5000 0
0 -0.0000 0.0000
0.1250 0.1250 0
-0.0625 -0.0625 -0.0000
0 -0.0000 0.0000
0.0156 0.0156 -0.0000
-0.0078 -0.0078 -0.0000
0 -0.0000 0.0000
0.0020 0.0020 -0.0000
-0.0010 -0.0010 -0.0000
0 -0.0000 0.0000
0.0002 0.0002 -0.0000
-0.0001 -0.0001 -0.0000
0 -0.0000 0.0000
0.0000 0.0000 -0.0000
-0.0000 -0.0000 -0.0000
0 -0.0000 0.0000
0.0000 0.0000 0.0000
-0.0000 -0.0000 -0.0000
0 -0.0000 0.0000